2021年10月20日,“双创天堂”2021苏州科技创新创业大赛总决赛暨颁奖仪式在苏州市双创中心举办。大赛旨在以科技创新引领着“大众创业,万众创新”向着更深层次和更高水平发展,扶持资金高达5000万元。大赛共有1233个项目报名参赛,415个项目进入路演季,覆盖电子信息、生物医药、先进制造等九大领域,最终遴选出308个项目拟立项姑苏科技创业天使计划,18个项目进入总决赛,角逐一二三等奖。

“双创天堂”2021苏州科技创新创业大赛总决赛开场
最终来自西北工业大学的“SpeedMap-实时地图重建与空中影像智能分析平台”项目荣获一等奖,该项目也将获得50万元项目经费资助。

苏州市人民政府副秘书长蒋华为一等奖项目颁奖(左一陈坚,左二陈霖)
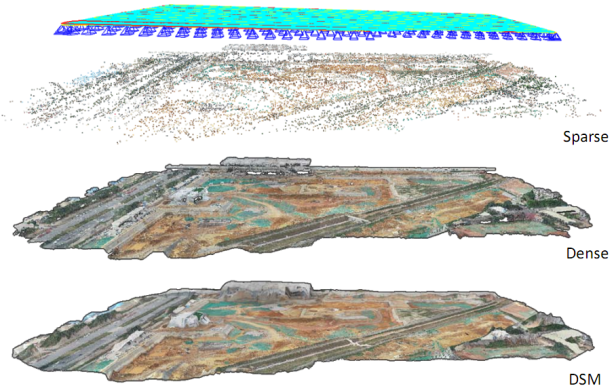
SpeedMap团队由航空学院布树辉教授和李霓教授指导,成员由主要来自西北工业大学的硕博团队组成,主要包含了两名博士和一名硕士。2016年,团队首提了大规模实时建图的概念,并开源了首个大场景二维建图框架Map2DFusion。这一概念,开创了无人机实时地图重建的先河。2019年开源的通用SLAM框架-GSLAM在开源社区受到开发者的广泛关注,并受邀在国际机器视觉领域顶会ICCV做报告。2020年团队开发出的DenseFusion框架,支持同时输出数字高程模型(DEM),数字正镶嵌模型(DOM)以及稠密点云(Point cloud)。
实时重建
此后团队从“泛测绘”需求入手,深耕快速制图领域,目前拥有全球首家且速度最快商用实时2D建图产品。目前市场上唯三成熟的实时二维正射建图产品(北美DroneDeploy,大疆智图),在一些场景下成图时间比传统快拼缩短1-2个数量级,同时可部署在机载端,手机端进行实时处理;拥有全球最佳的3D实时地图产品。团队开发的3D实时点云地图,结合实时地形图重建,在成图速度、精度和效果上都优于其他同类产品;拥有全球唯一成熟的2.5D实时地图产品。在输出稠密点云的同时,能够基于点云信息实时构建地形图,正射图,并拥有核心知识产权保护;能够满足农业植保、能源巡检、应急响应及救援、自然灾害检测、国防及公共安全等领域的迫切需求。当发生事故后,可以通过无人机迅速将事故现场成图并反馈相关部门,省时省力的同时还保证准确度,为无人机泛测绘行业应用提供了快速解决方案。

湖北恩施滑坡现场,SpeedMap团队协助抗洪救灾
目前项目产品已经被应用于安防、植保、应急消防等多个领域。并且和深圳道通无人机,航天科工,翔拓航空、解放军信息工程大学等诸多单位有合作。





